Baza wiedzy w usługach dronowych
Bonitacja, klasa bonitacji drzewostanu – wskaźnik określający możliwości produkcyjne siedliska leśnego dla danego gatunku. Klasę bonitacji określa się na podstawie wieku i wysokości drzewostanu.


BSL – skrót od: Bezzałogowy Statek Latający. Inaczej: bezzałogowiec lub dron.

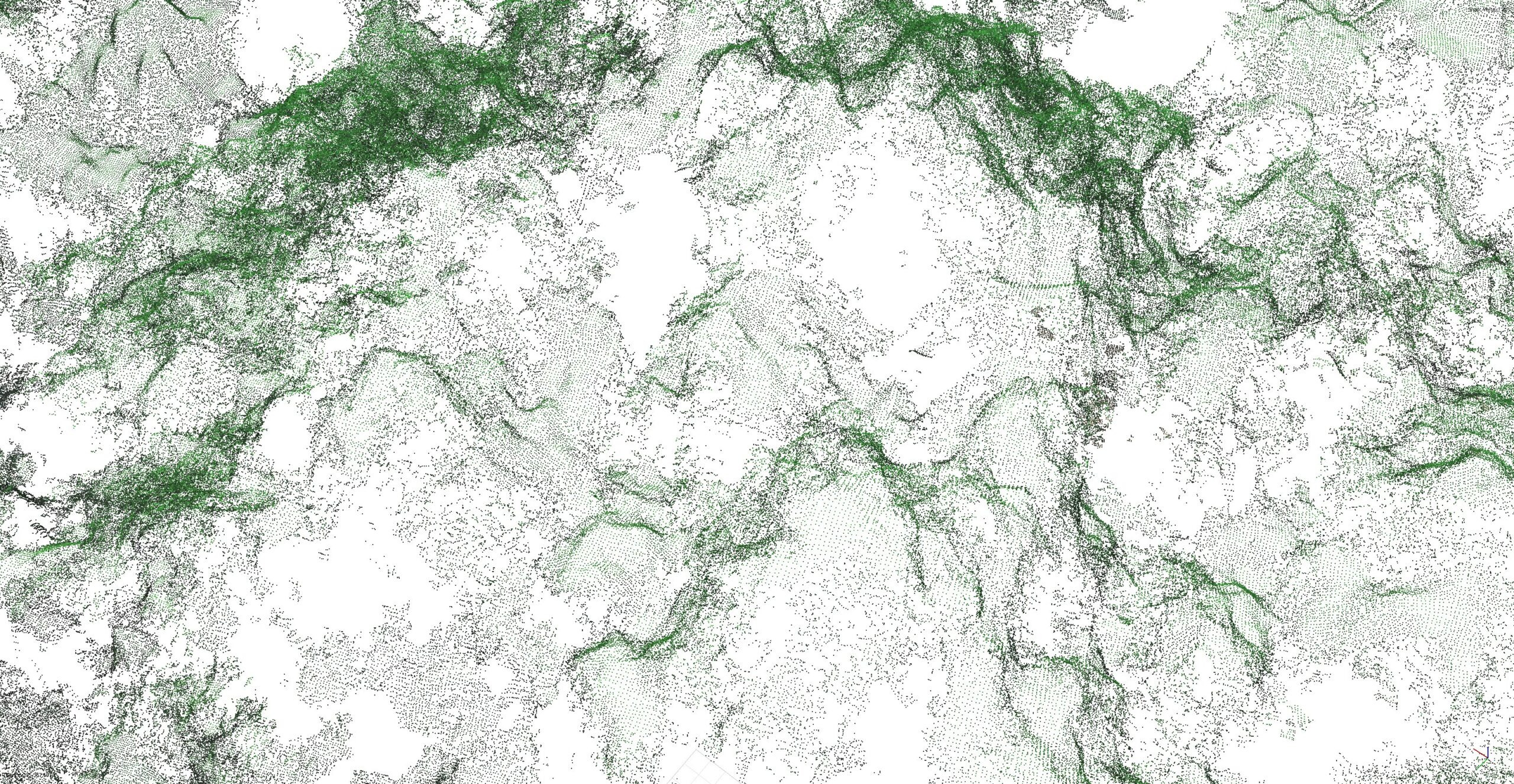
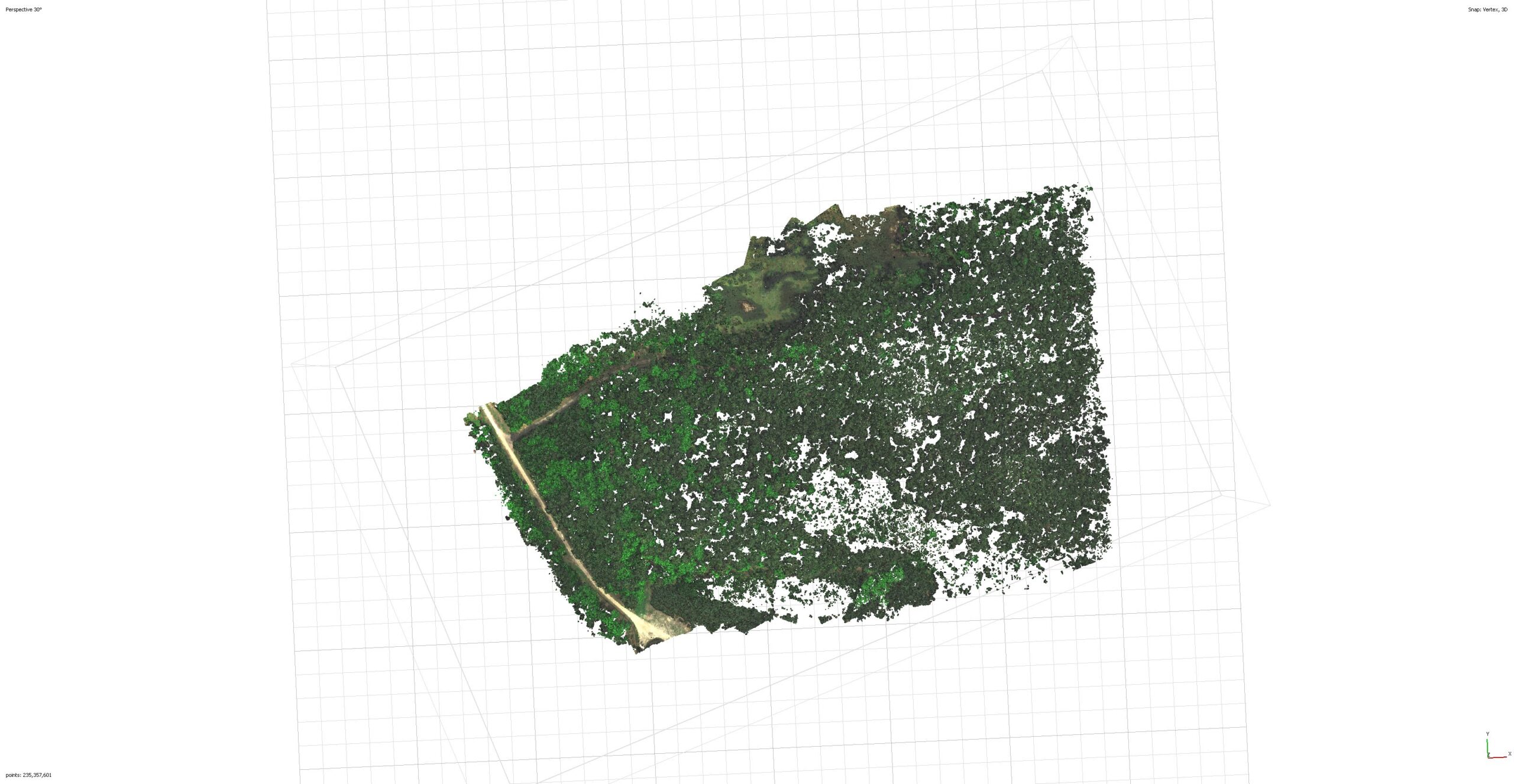
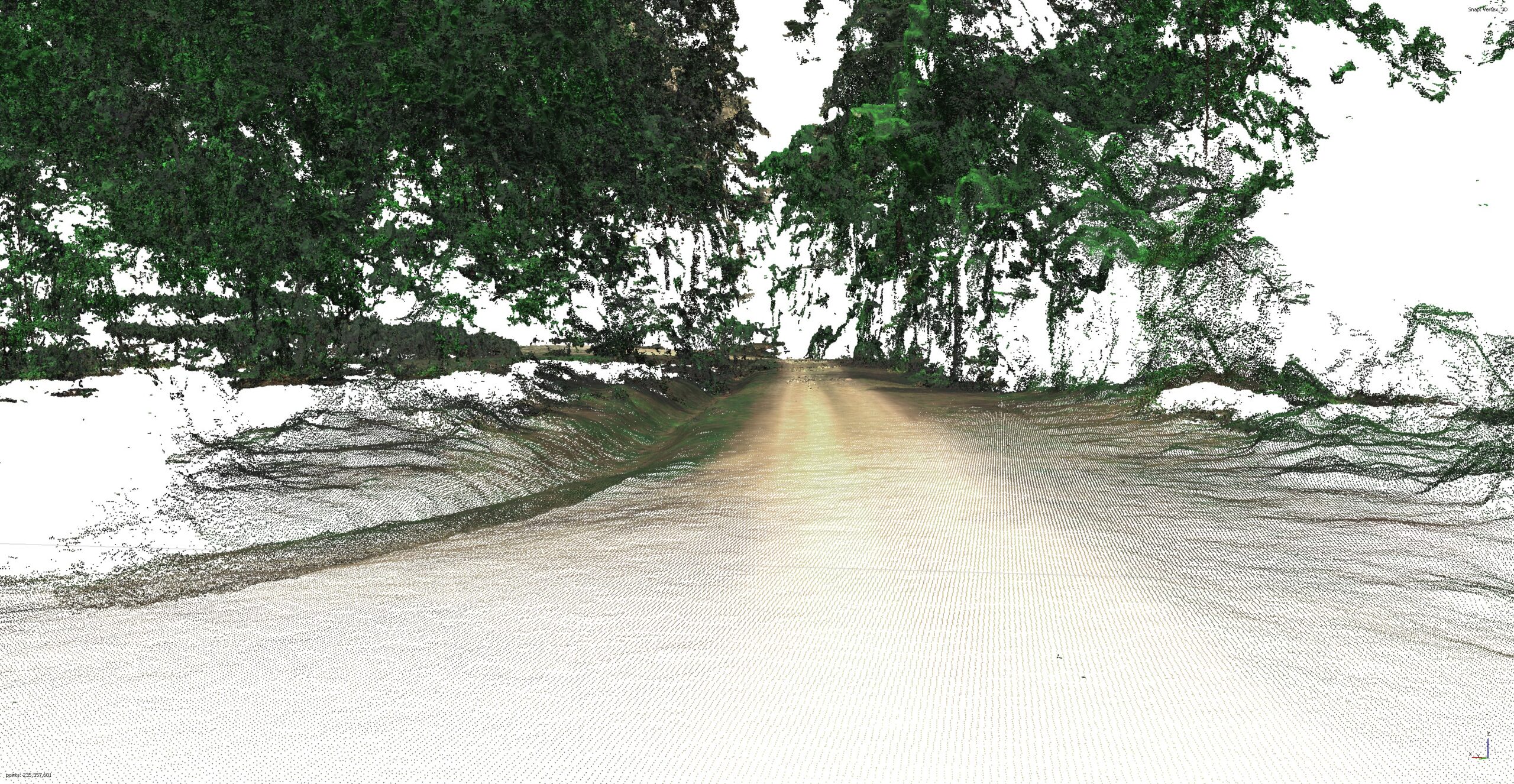
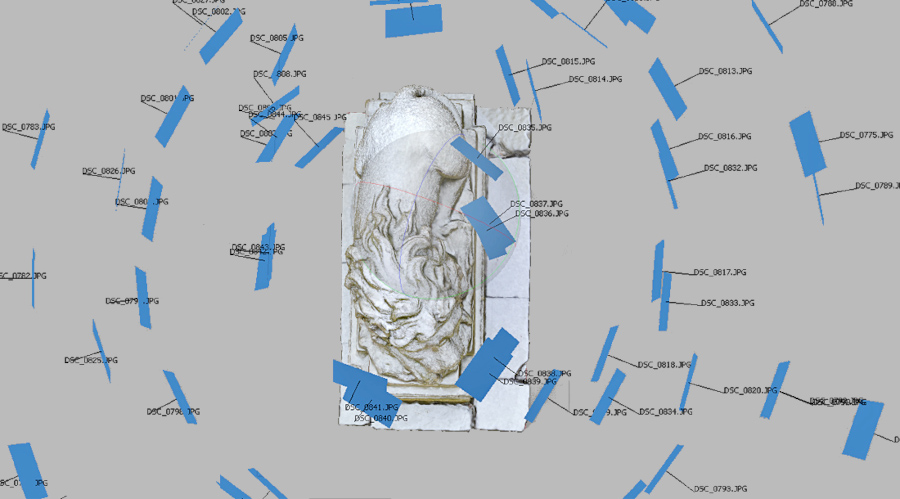
Point cloud (Chmura punktów) – Jest to zbiór punktów odwzorowujących geometrię analizowanego obiektu lub całego obszaru. Może być docelowym produktem procesu fotogrametrycznego, jednakże najczęściej pełni funkcję składnika pozwalajacego stworzyć inne opracowania – ortomozaiki, numeryczne modele terenu lub modele 3d.
Chmury punktów pozwalają również na analizy ilości biomasy w zastosowaniach rolniczych i leśnych oraz kubatur zwałowisk i składowisk w aplikacjach przemysłowych.

Defoliacja – pozbawienie rośliny liści wskutek oddziaływania czynników zewnętrznych lub substancji chemicznych. Najczęściej spowodowane gradacją owadów, chorobami roślinnymi lub defoliantami (np.: tiomocznik, chloran sodu).

Herbicydy – typ środków ochrony roślin dedykowany do zwalczania chwastów.
Fotogrametria – to dziedzina nauki zajmująca się „przenoszeniem” realnych obiektów i obszarów do postaci wirtualnej. W procesie tym wykorzystuje fotografie wykonywane z ziemi aparatem fotograficznym, lub z powietrza – kamerami zainstalowanymi na pokładzie BSL.
Aby odtworzyć geometrię interesujacego nas obszaru zebrane w trakcie nalotu fotogrametrycznego zdjęcia muszą zostać przetworzone przez odpowiednie oprogramowanie. Odnajduje ono na fotografiach punkty wspólne i w oparciu o nie wyrównuje wszystkie obrazy a następnie zaczyna odtwarzać geometrię interesującego nas obszaru w formie i wymiarach odpowiadających rzeczywistym.
Produktami procesu fotogrametrii są: Chmura Punktów, Numeryczny Model Terenu, Ortofotomapa.
Kamera wielospektralna – jest to rodzaj kamery, która jest zdolna rejestrować światło w różnych zakresach widma, także poza zakresem widzialnym dla ludzkiego oka (np. w bliskiej podczerwieni lub ultrafiolecie).
Kamery wielospektralne pozwalają uzyskać więcej informacji na temat obiektów i środowiska niż sensory tradycyjne. Dlatego coraz częściej znajdują zastosowanie w rolnictwie precyzyjnym, leśnictwie, monitoringu środowiska a nawet nadzorze nad zielenią miejską.
Najczęściej mają postać wieloobiektywowego zespołu sensorów, gdzie każdy z nich oddzielnie rejestruje światło w bardzo wąskim spektrum by następnie zapisać go jako osobny obraz na karcie pamięci.

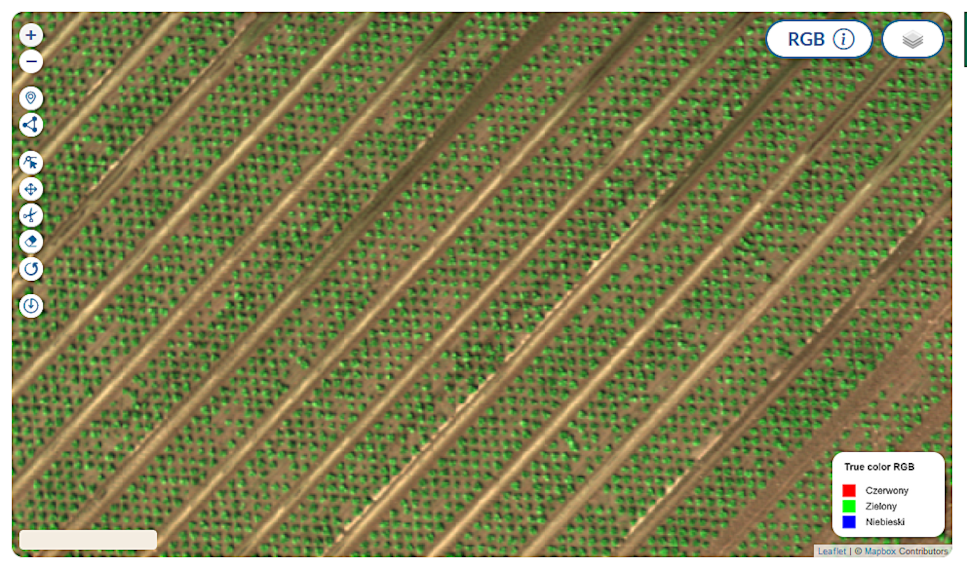
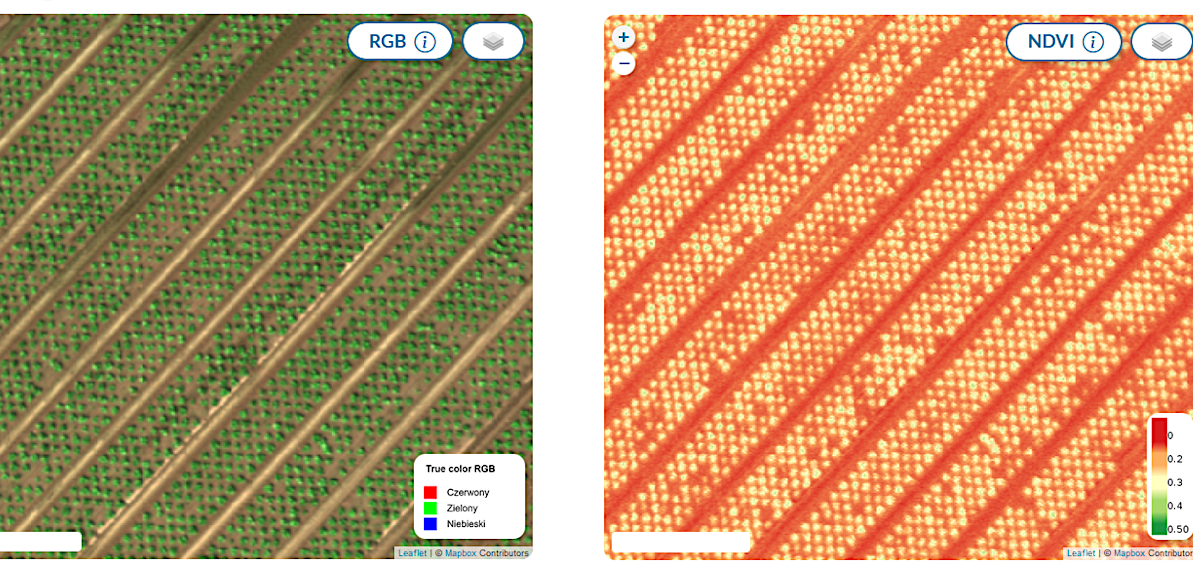
Mapy RGB – obrazy tego typu odwzorowują naturalną kompozycję kolorów widzianych przez ludzkie oko. Zwane są także obrazami w świetle widzialnym lub w barwach prawdziwych (TCI – True Color Image). Obraz RGB jest rastrem złożonym z trzech kanałów: Czerwonego (R – Red), Zielonego (G – Green) oraz Niebieskiego (B – Blue), połączonymi w takiej właśnie kolejności, odwzorowując przestrzeń barwną widzianą przez ludzkie oko.
Obrazy RGB służą przede wszystkim jako podstawa pomiarów i klasyfikacji obiektów na gruncie. Nie są tożsame z mapami wskaźnikowymi i nie mogą (bez uprzedniego przetworzenia) być podstawą do opracowania na ich bazie, np. map aplikacyjnych. Rastry RGB są wielokanałowe, a ich piksele reprezentują kompozycję jasności pikseli wszystkich 3 kanałów nakładających się na siebie w danej lokalizacji.
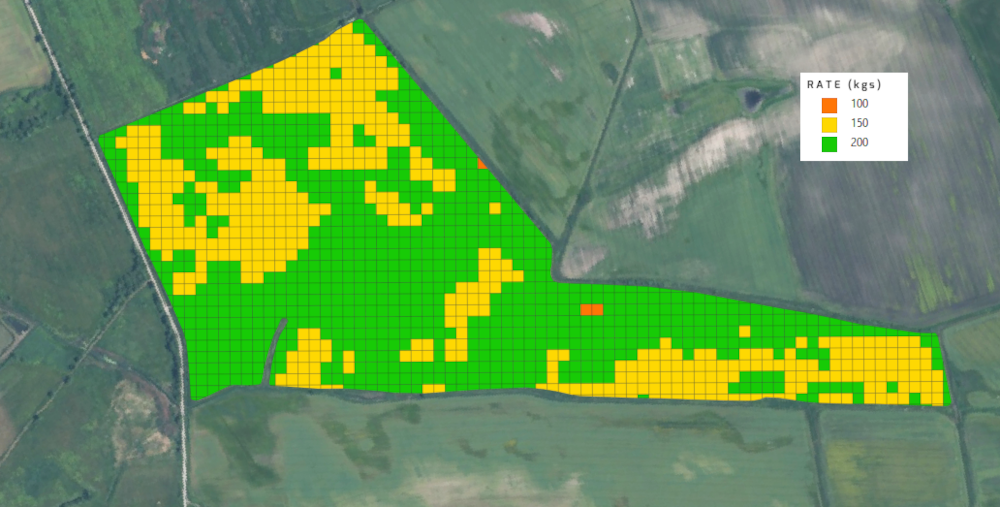
Mapa aplikacyjna – mapa utworzona na bazie mapie wskaźnikowej będąca „instrukcją” dla rozsiewacza lub opryskiwacza informująca maszynę o wielkości dawek przewidzianych do wydania na danym fragmencie pola.
Mapa aplikacyjna przyjmuje postać plików w formatach: KML, Shapefile lub ISO-XML.
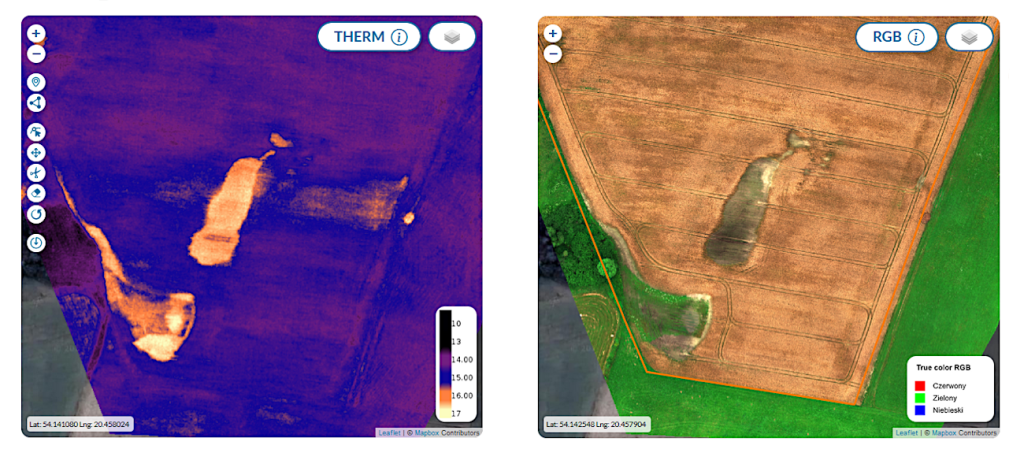
Mapa termograficzna określa temperaturę każdego zarejestrowanego na niej piksela. Pozwala ocenić temperaturę i wilgotność wierzchniej warstwy gleby oraz zbadać stopień transpiracji liści. Wyższe wartości temperatury mogą sygnalizować problemy z nawodnieniem, zwiększoną podatnością na suszę lub ataki agrofagów. Niższe – potencjalne wymoknięcia i ogniska chorób grzybowych.
Zakresy badanych temperatur będą różnić się w zależności od pory dnia i warunków pogodowych w jakich wykonano lot. Dlatego mapę należy analizować z większym naciskiem na różnice występujące na danej uprawie w tym samym czasie.
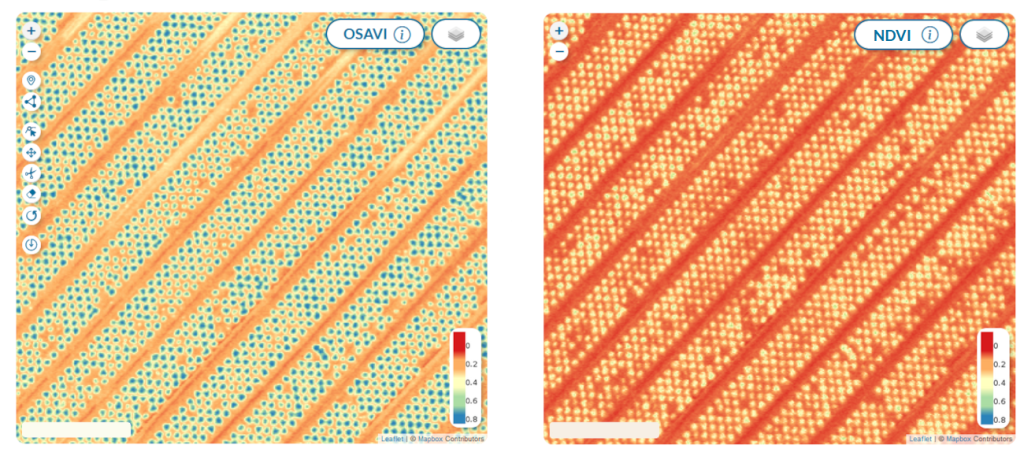
Mapa wskaźnikowa – jest wizualizacją odzwierciedlającą kondycję roślinności na obserwowanym przez nas obszarze. Mapy wskaźnikowe nie przybierają postaci ortomozaiek w tonacji RGB, nie są podobne „klasycznym” obrazom, do których stworzenia wykorzystano wiele widm. Jako pochodne wcześniej przeprowadzonych analiz, pojedynczy piksel nie odzwierciedla koloru znajdującego się w danym miejscu obiektu a jedynie wartość wskaźnika obliczonego na bazie kilku kanałów. Obraz ten zostaje więc niejako „spłaszczony” i przyjmuje postać jednokanałową, gdzie kolory są jedynie wizualizacją wartości wskaźnika w danym obszarze.
Informacja o wartości wskaźnika to jednak nie wszystko co przechowuje komórka obrazu. Poza nią piksel ma przypisane również współrzędne GPS, co daje użytkownikowi unikalną możliwość identyfikacji pojedynczych ognisk problemów i walkę z zagrożeniami w zarodku, zanim rozprzestrzenią się na większe obszary. Informacja zawarta w mapie wskaźnikowej stanowi zatem bazę do precyzyjnych zabiegów ochronnych i nawożenia!
Aby móc nawozić i opryskiwać precyzyjnie, mapa wskaźnikowa musi zostać najpierw przekształcona w mapę aplikacyjną.

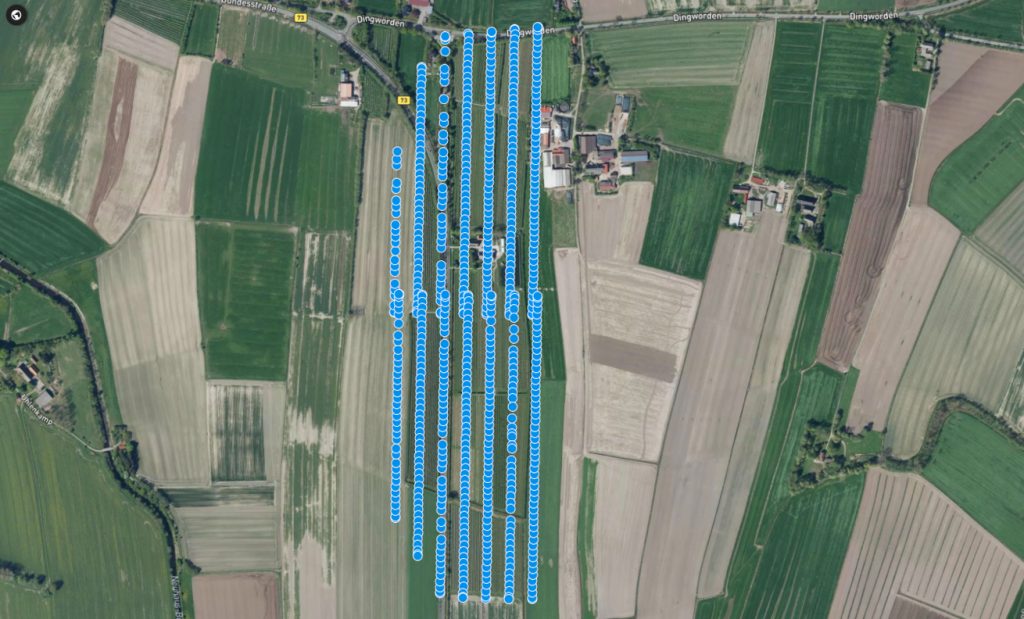
Nalot fotogrametryczny – lot wykonywany przy pomocy BSL (w naszym przypadku!) po wcześniej zaprogramowanej trasie z uwzględnieniem parametrów produktu finalnego (np. potrzeby osiągnięcia rozdzielczości obrazu równej X cm/piksel).
Naloty fotogrametryczne wykonujemy aby zdobyć dane do opracowywanych ortofotomap i map wskaźnikowych. Loty przeprowadzamy z różnymi sensorami na pokładzie – kamerą RGB lub wielospektralną, a parametry lotu każdej z operacji są podporządkowane możliwościom optycznym sensora i zakładanej wielkości piksela terenowego (obszarowi gruntu obejmowanego rozmiarem pojedynczej komórki obrazu).
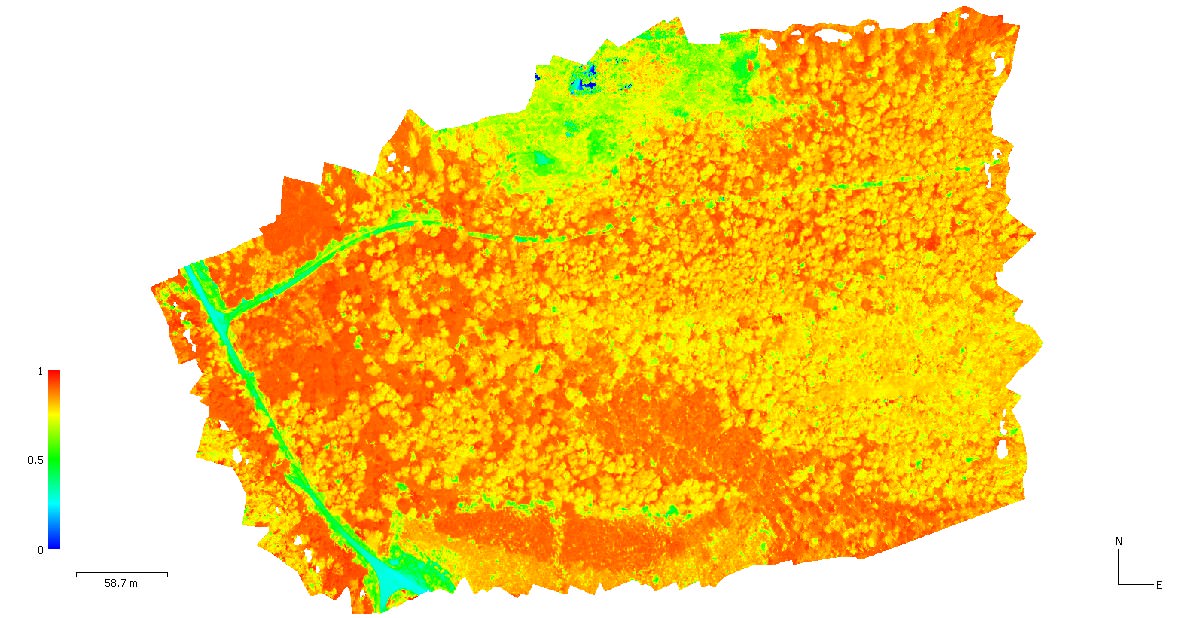
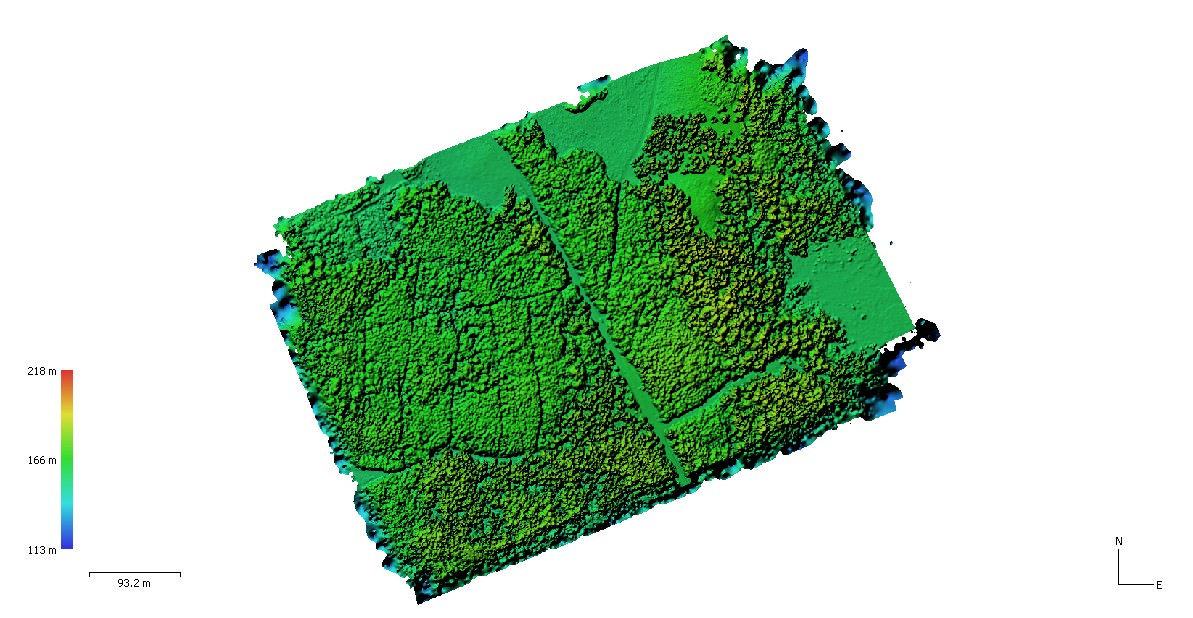
Numeryczny Model Koron to wynik subtrakcji NMPT i NMT owocujący uzyskaniem informacji o wysokości względnej obiektów (przede wszystkim drzew) nad powierzchnię gruntu.
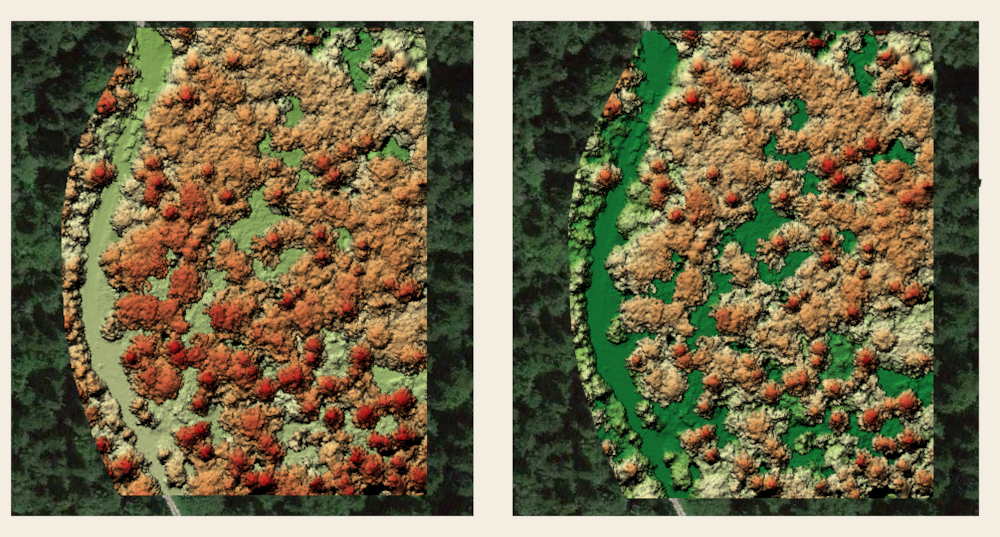
Porównanie modelu NMT ( z lewej) i NMK (z prawej). Dosokonale widoczne są różnice w kolorystyce obrazujące wysokość zarejestrowango terenu. O ile na obazie po lewej tonacja zieleni zdradza pofałdowaną rzeźbę powierzchni, po prawej jest jednorodna – znormalizowana, umożliwiając tym samym poznanie realnej wysokości drzew na mapowanym obszarze.
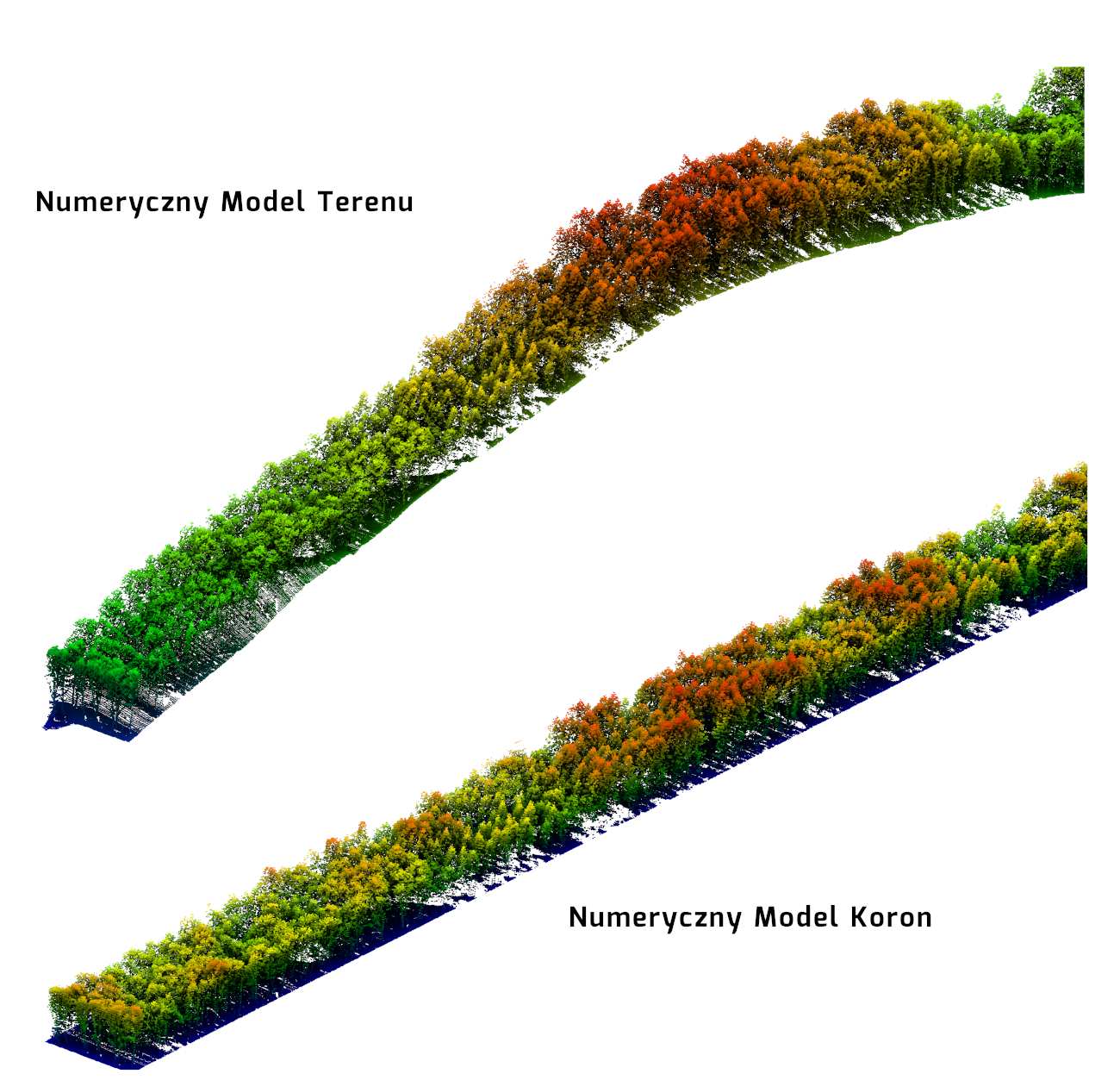
Numeryczny Model Koron dostarcza informacji do wielu typów analiz przydatnych Leśnikom. Pozwala na określenie wysokości drzewostanu, monitorować jego wzrost, a służąc jako składowa – uzyskiwać dokładniejsze dane o kondycji upraw leśnych.
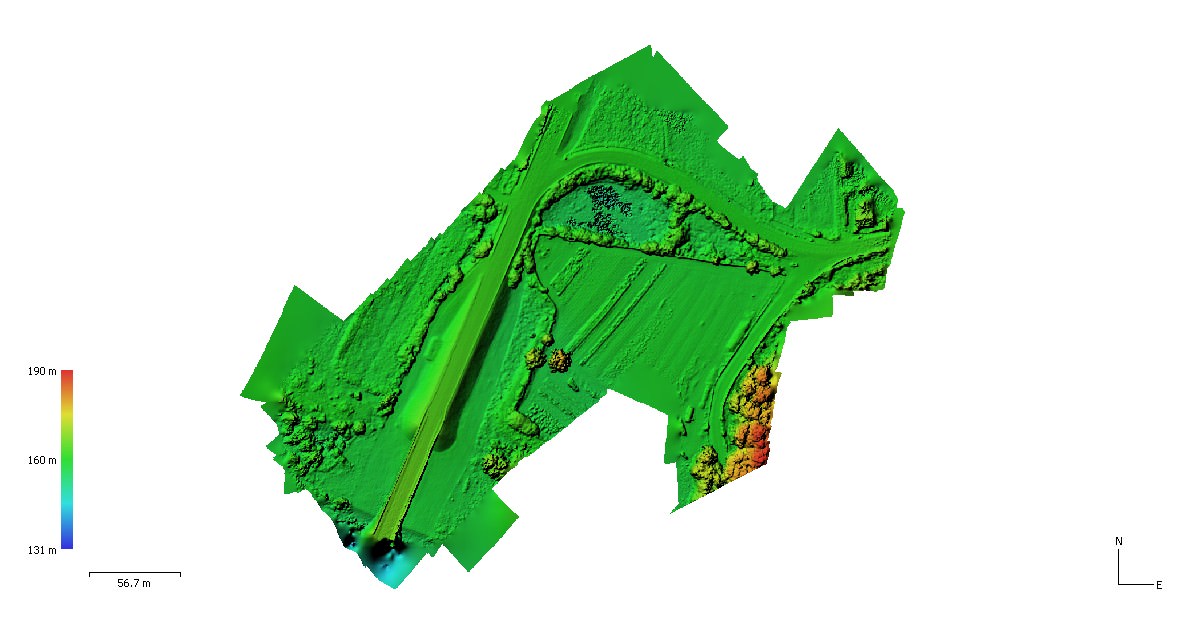
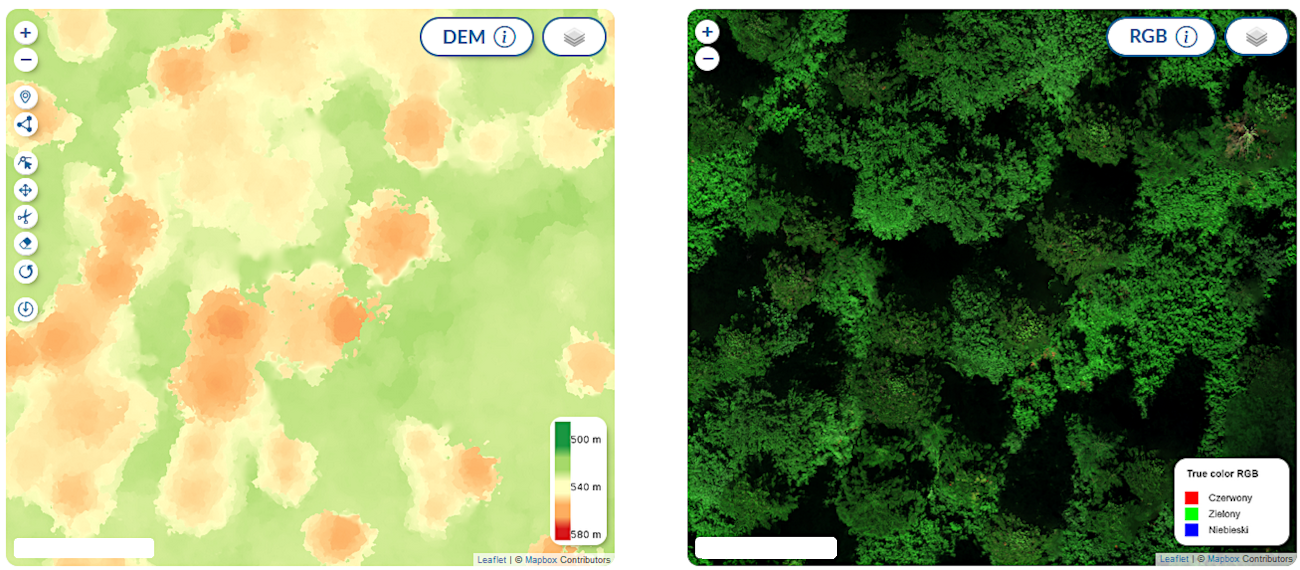
DEM (Digital Elevation model) – NMPT (Numeryczny model pokrycia terenu) – model powierzchni (rzeźby) terenu uzupełniony o elementy naturalne (roślinność) i antropogeniczne (budynki, budowle). Odwzorowanie kolorystyczne oraz w pewnym stopniu trójwymiarowe. W przypadku analizy drzewostanu umożliwia:
- Podział na klasy powiązane z wiekiem drzewa – wyższe drzewa to starsze drzewa
- Detekcję drzew
- Określenie gęstości zalesienia
- Pomiary metryczne itp.

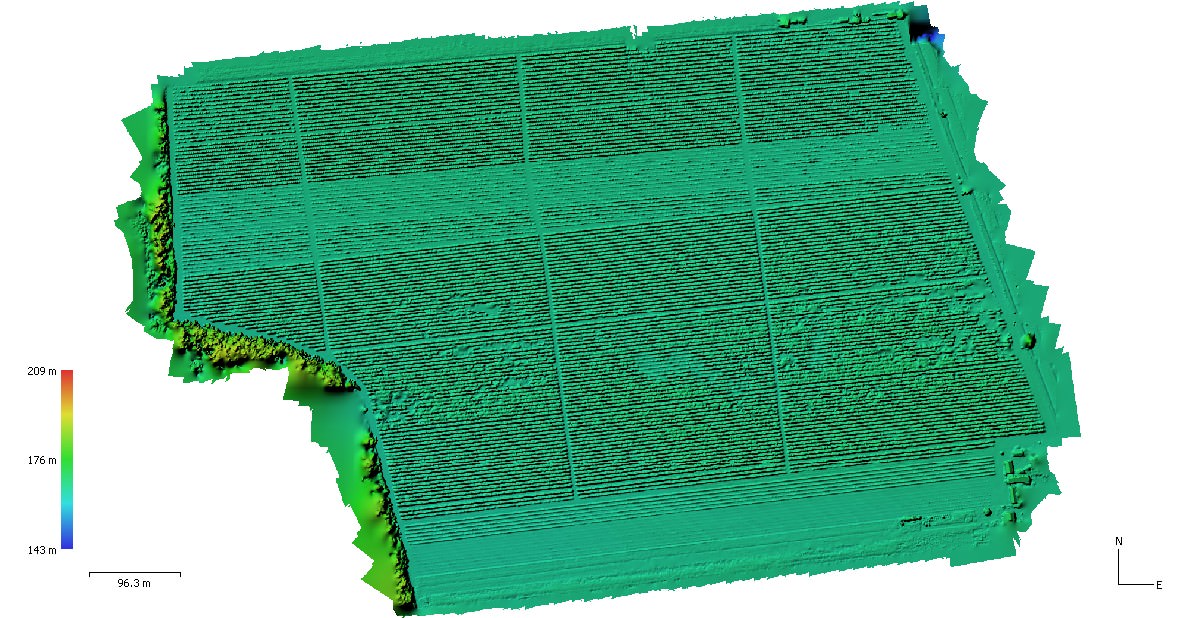
Numeryczny model terenu – (z ang. DSM – Digital Surface Model, DEM – Digital Elevation Model) to obraz, którego każdy piksel (komórka) odzwierciedla wysokość punktu nad poziom morza. Należy zaznaczyć, iż NMT nie jest modelem trójwymiarowym. Jest to tak zwany model 2,5D gdyż nie odzwierciedla np. geometrii ścian budynków, pni, czy ścian skalnych a jedynie atrybut wysokości w lokalizacji komórki.
Mówiąc o modelach terenu wspominamy zazwyczaj o dwóch ich rodzajach:
- NMT/DEM – Numeryczny Model Terenu – odzwierciedlający wysokość punktu nad poziom morza. Jest to model odwzorujący wyłącznie konfigurację gruntu. Bez drzew, budynków i innych obiektów, które są na nim posadowione. Model ten jest idealnym narzędziem np. do analiz hydrologicznych.
- NMPT/DSM – Numeryczny Model Pokrycia Terenu – jest to model przechowujący dane o wysokości nad poziomem morza każdego zarejestrowanego punktu, także reprezentującego klasę roślinności lub budynków.
Ortofotomapa – Obraz obszaru zainteresowania wykonany w oprogramowaniu fotogrametrycznym poprzez przetworzenie serii zdjęć w taki sposób, iż użytkownik zawsze ogląda każdy fragment mapy z perspektywy pionowej. Jest to tzw. rzut ortogonalny, czyli pozbawiony zniekształceń geometrycznych narzucanych przez perspektywę.
Ortofotomapy mogą mieć różną rozdzielczość przestrzenną, zwaną też wielkością piksela terenowego lub GSD (ang. Ground Sampling Distance), czyli wielkości obszaru na gruncie reprezentowanej przez pojedynczy piksel obrazu mapy. Waha się ona od kilku metrów na pojedynczy piksel (mapy wykonane na bazie zobrazowań satelitarnych), poprzez kilka(dziesiąt) centymetrów (ortofotomapy lotnicze) aż do wartości pojedynczych centymetrów dla map wykonanych w oparciu o dane pozyskiwane BSL.
Ortoforomapa to dosyć pojemna treściowo kategoria, nie ogranicza się bowiem wyłącznie do map zwizualizowanych w świetle widzialnym (RGB). Ortofotomapą będzie także mapa w tonacji CIR, mapa wskaźnikowa, czy mapa termalna. Każdy z tych obrazów bowiem stworzony został w rzucie ortogonalnym.


Pestycydy – syntetyczne lub naturalne substancje używane do zwalczania organizmów szkodliwych lub niepożądanych, stosowane głównie do ochrony roślin uprawnych i lasów.
Pomiary multispektralne – polegają na rejestracji obrazu w różnych spektrach (widmach) światła przy pomocy odpowiednich sensorów. Dzięki charakterystycznym dla każdego przedmiotu właściwościom odbicia i pochłaniania poszczególnych wiązek światła, jesteśmy w stanie uzyskać interesujące nas informacje, np. określić stopień wegetacji roślin. Do pomiarów multispektralnych wykorzystujemy zdjęcia satelitarne, drony wyposażone w czujniki wielospektralne oraz sensory (czujniki) naziemne.
Precyzyjne rolnictwo – system gospodarowania oparty o nowoczesne metody informatyczno-technologiczne. W rolnictwie precyzyjnym wykorzystujemy m. in. bezzałogowe statki powietrzne, sensory multispektralne, techniki pozycjonowania satelitarnego (GPS) oraz teledetekcje.


Teledetekcja – to technika zbierania informacji o obiektach lub obszarach w sposób zdalny, bez fizycznego kontaktu z nimi. Teledetekcja jest powszechnie stosowana w bardzo szerokim spektrum dziedzin. Nie ograniczają się one do rolnictwa ani leśnictwa. Metody teledetekcyjne są również niezwykle przydatne w meteorologii, monitoringu środowiska, geologii ale także np. w sferze bezpieczeństwa i rozpoznaniu pola walki.
Technologie teledetekcyjne wykorzystują dane zbierane wieloma typami sensorów. Oprócz najczęściej montowanych na dronach kamer RGB oraz wielospektralnych, znajdziemy bardziej skomplikowane: kamery hiperspektralne, LIDARy, radary, czy magnetometry.

Wskaźnik wegetacyjny – to miara, która pomaga nam zrozumieć, czy rośliny na interesującym nas obszarze są zdrowe i rosną w sposób niezakłócony. Każdy ze wskaźników to odpowiednia formuła matematyczna, wykorzystująca wąskie widma promieniowania elektromagnetycznego (bo nie tylko światła widzialnego!) determinująca jego charakterystykę i zastosowanie. Formuła ta może mieć bardzo prostą formę lub być wzbogacona o współczynniki korygujące, pozwalające odfiltrować szumy i lepiej przystosować do mapowania konkretnego typu roślinności.
Wysokie wartości wskaźnika wegetacyjnego – zazwyczaj – sugerują zdrową i bujną roślinność, podczas gdy niższe wartości mogą wskazywać na problemy związane z brakiem wody, chorobami roślin lub innymi czynnikami wpływającymi na ich kondycję. Należy pamiętać jednak, iż z biegiem sezonu wegetacyjnego zmieniają się wartości odbijanego od roślin światła i wskazanie, które zazwyczaj mogłoby oznaczać problemy sygnalizuje np. przejście z jednej fazy sezonu do kolejnej. Warto zatem korzystać równolegle z więcej niż jednego indeksu, aby mieć pełen obraz wigoru naszych upraw.
W bazach danych wskaźników wegetacyjnych figuruje już ponad 500 indeksów wykorzystujących różne widma promieniowania elektromagnetycznego. Bez problemu znajdziesz zatem coś odpowiedniego dla twojej uprawy!
CIR to skrót od „Color InfraRed” i odnosi się do wykorzystania w kompozycji obrazu widma bliskiej podczerwieni (NIR) w miejsce widma niebieskiego. Obraz w barwach fałszywych (bo tak również CIR jest nazywany) używany jest w teledetekcji do zwiększania możlowości interpretacyjnych roślinności, gleby, czy wody bez konieczności używania wskaźników wegetacyjnych.
CIR doskonale wizualizuje różnice w nawodnieniu pól oraz świetnie wyznacza granice zbiorników wodnych, co w rolnictwie przekłada się chociażby na łatwiejsze szacowanie wielkości obszarów zalanych bądź mających problemy z nawodnieniem. Gleby lekkie i wysuszone będą miały dużo jaśniejszy odcień niż te, które zawierają więcej materii organicznej lub są bardziej wilgotne co przekłada się na kolorystykę zarejestrowanego obrazu. W kontekście gleb CIR pozwoli nam dużo łatwiej niż, np. obraz RGB odróżnić rejony piaszczyste od bardziej gliniastych.
Cechą charakterystyczną obrazów CIR jest zmiana barw roślinności z zieleni (jak widzimy ją na co dzień) na czerwień a gruntu – przesunięcie w kierunku ziemistego, niebieskiego a nawet zieleni. Z uwagi na całkowite pochłanianie światła w widmie bliskiej podczerwieni przez wodę, kałuże, zastoiska i inne obszary zalane są doskonale widoczne w tonacjach zbliżonych do czerni.

EVI – (ang. Enhanced Vegetation Index) wskaźnik, podobnie jak NDVI, służący do monitoringu roślinności. Został wprowadzony, aby poprawić niektóre ograniczenia NDVI i jest powszechnie stosowany w bardziej wymagających zastosowaniach, takich jak monitoring obszarów leśnych.
EVI jest preferowany w sytuacjach, gdy warunki atmosferyczne mogą wpływać na dokładność pomiarów. Zdarza się tak nierzadko w przypadku NDVI, nie tylko przy zmiennym zachmurzeniu ale nawet gdy niebo jest bezchmurne a zdjęcia rejestrowane były o różnych porach dnia.
EVI dzięki wzbogaceniu formuły o współczynniki wagowe i korygujące pozwala uniknąć przesycenia odbiciem gleby we wczesnych fazach wzrostu a zastąpienie widma czerwonego czerwienią krawędziową umożliwia uzyskanie wierniejszych rezultatów dla roślinności wysokiej lub o złożonej budowie.
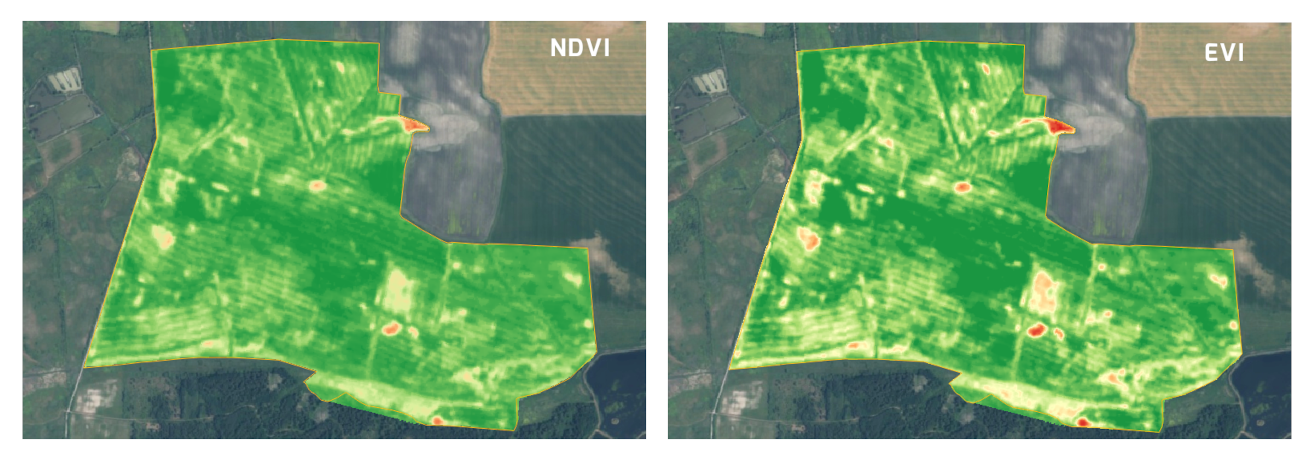
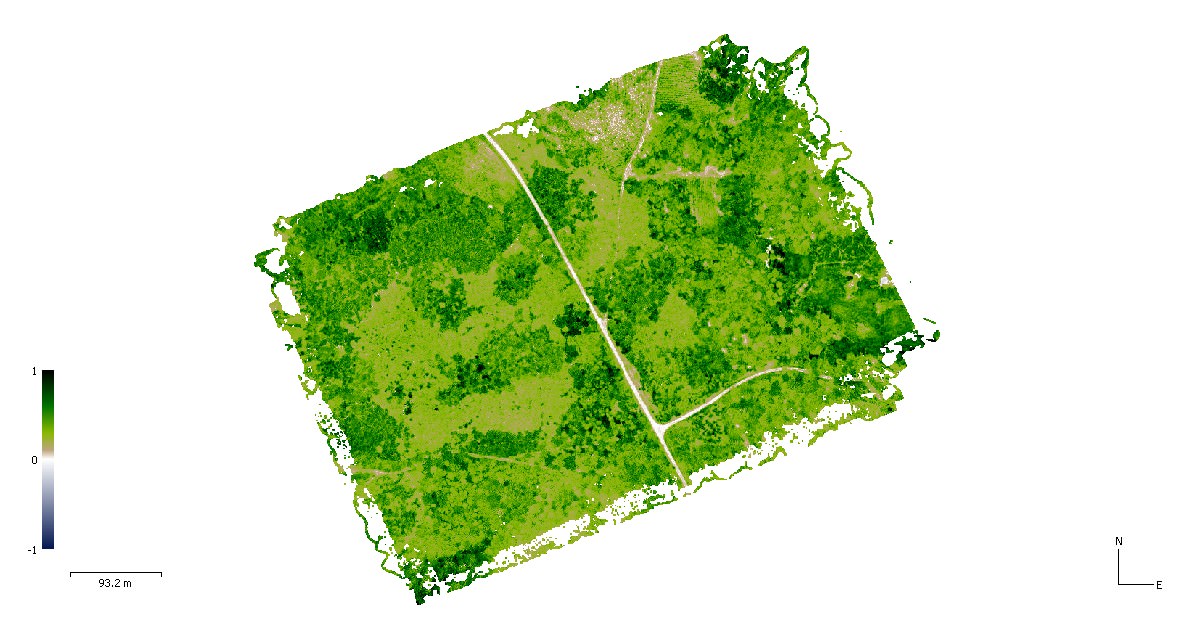
Wskaźnik NDVI – (z ang. znormalizowany różnicowy wskaźnik wegetacji) – jest podstawowym wskaźnikiem pozwalającym mierzyć kondycję roślinności. Jego formuła obejmuje wykorzystanie kanałów czerwonego i bliskiej podczerwieni.
Wyższe wartości wskazują większą ilość aktywnej fotosyntetycznie biomasy. Wartości niższe mogą oznaczać roślinność osłabioną, jej brak lub końcowe etapy cyklu wegetacyjnego.
Wysoka czułość wskaźnika na odbicie nagiego gruntu powoduje, iż we wczesnych fazach rozwojowych analizę warto wesprzeć np. OSAVI, które pozwoli uzyskać bardziej celne wskazania odbicia przez roślinność.
NDVI przyjmuje zazwyczaj wartości w przedziale od -1 do 1 acz – jeśli na mapowanym obszarze znajdą się np. wysoce refleksyjne obiekty (choćby stalowy dach budynku) – zakres wskazań może ulec zwiększeniu.
Wskaźnik przyjmuje wartości w przedziale od -1 do 1, które na mapie odwzorowywane są kolorystycznie:
- Poniżej 0,2 – tereny bez roślinności, np. odkrytą glebę, martwa materię organiczną, woda, śnieg, zabudowania itp.
- Między 0,2 a 0,4 – roślinność szczątkowa
- Między 0,4 a 0,7 – roślinność w dobrej kondycji
- Powyżej 0,7 – roślinność w bardzo dobrej kondycji. Należy jednak pamiętać, że na zakres wskaźnika mogą wpływać różne czynniki (inny rodzaj uprawy, miejsce uprawy itp.), dlatego warto odnosić się do przeciętnych wartości wskaźnika na całym polu oraz danych historycznych, aby dobrze ocenić stan drzewostanu.

Wskaźnik NDRE – (ang. Normalized Difference Red Edge Index – Znormalizowany różnicowy wskaźnik kanału czerwonego brzegowego) podobny w swojej formule i zastosowaniu do NDVI. Zamiast pasma bliskiej podczerwieni wykorzystuje jednak kanał Czerwony Brzegowy (ang. Red Edge) co czyni go bardziej czułym od NDVI na najmniejsze nawet zmiany w wigorze.
Widmo RedEdge jest mniej podatne od kanału Czerwonego i Bliskiej Podczerwieni na zakłócenia atmosferyczne, czy wpływ kąta padania światła, co pomaga w uzyskaniu bardziej precyzyjnych danych w warunkach zanieczyszczonej atmosfery lub wczesnych okresach cyklu wegetacyjnego. Umożliwia także lepsze rozróżnianie różnych faz wzrostu roślin, takich jak fazę wegetatywną czy fazę dojrzewania, co jest istotne w monitorowaniu roślinności na różnych etapach jej rozwoju.
Wykorzystanie RE pozwala na rejestrację bardziej subtelnych zmian w zawartości chlorofilu w liściach roślin – co ważne! – nie tylko w szczytowych jej partiach, co przekłada się na dokładniejszą ocenę kondycji całej rośliny.
Zamiana w formule wskaźnika widma Czerwonego na RedEdge owocuje jeszcze jedną, niezwykle ważną cechą: sprawia mianowicie, iż NDRE pozwala na dużo celniejszą ocenę zawartości azotu w roślinach, co jest kluczowe z punktu widzenia precyzyjnego nawożenia tym pierwiastkiem.

OSAVI – (ang. Optimized Soil-Adjusted Vegetation Index) to jedna z modyfikacji indeksu NDVI, która została opracowana w celu zmniejszenia wpływu gleby na wartości wskaźnika wegetacyjnego. OSAVI jest szczególnie przydatny w obszarach o znacznym tle glebowym oraz w okresach wschodów, kiedy młode rośliny – choć zdrowe – nie okrywają jeszcze liśćmi wystarczającego obszaru wokół siebie co przekłada się na niskie wskazania NDVI.